


研究案例
CASES
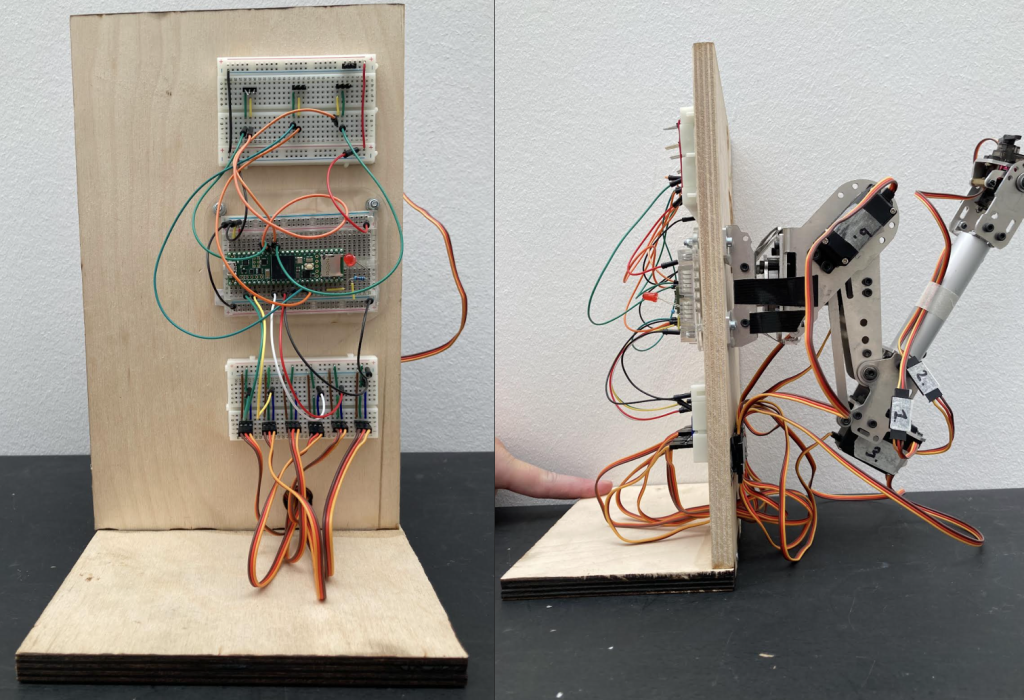
大家好,我是 Xander!!!我成功开发了一款名为 Zeroeth BCI 的脑控辅助喂食机器人系统。该系统包含一个一自由度(DOF)的勺臂和一个三自由度的抓取臂,分别用于舀取和抓取食物。这些机械臂通过脑机接口(BCI)流水线进行控制。这个个人项目涉及将 OpenBCI 的 4 通道 Ganglion 生物传感板与 Arduino Uno R3 连接,实现通过思维控制机械臂完成喂食动作。

Zeroeth BCI 的喂食流程
为简化操作,该系统的控制通过 OpenBCI GUI 中的 焦点小部件 激活。当用户处于专注状态时(通过连接在头皮 FP1 和 FP2 位置的电极进行生物信号检测),机械臂会启动并执行预编程的喂食动作,从而完成对用户的喂食。本项目选用的食物是尼日利亚小吃 Puff-Puff。

系统电路连接示意图
在非洲,尤其是尼日利亚,脑机接口设备的应用仍属创新尝试。该项目旨在满足上肢残疾甚至处于闭锁状态用户的喂食需求,并可进一步优化,用于帮助残障人士实现更多自助功能,甚至应用于脑控智能家居场景。这将显著提升用户的独立性。
本项目展示了 OpenBCI 技术能够以较低的使用和实施难度,推动创新型、易操作的机器人应用与接口开发。它不仅证明了利用脑电波驱动模块化机器人的潜力,更为人机交互开辟了新的可能性,推动了机器人技术、BCI 生成艺术与娱乐,以及神经科学/神经技术领域的整体进步。
特别感谢 OpenBCI 团队让我有机会参与这一旅程。
如有任何问题、合作意向、建议或提示,请随时通过邮件联系我:aminonelex@gmail.com。

 扫码获取报价
扫码获取报价